







新闻中心 
开源!V2Xverse:上交发布首个面向V2X的*平台与端到端模型
 2024-05-23
2024-05-23 浏览次数:次
浏览次数:次 返回列表
返回列表
车路协同的同步驾驶数据
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

车路协同辅助的 自动驾驶V2X-AD(Vehicle-to-everything-aided autonomous driving)在提供更安全的驾驶策略方面具有巨大潜力。研究者们在V2X-AD的通信和通信层面进行了大量的研究,但是这些基础设施和通信资源在提高驾驶性能方面的效果仍未得到充分探索。这突显了研究协同自动驾驶的必要性,即如何设计面向驾驶规划的高效信息共享策略,从而提高每辆汽车驾驶性能。
这需要两个关键的基础条件:一个是能够为V2X-AD提供数据环境的平台,以及一个具有驾驶相关完整功能以及信息共享机制的端到端驾驶系统。
在提供数据环境的平台方面,可以利用车辆之间的通信网络以及基础设施的支持来实现。通过这种方式,车辆可以共享驾驶所需的实时和环境信息,从而提高驾驶性能。
另一方面,端到端驾驶系统需要具备完整的驾驶功能,并能够共享信息。这意味着驾驶系统应该能够获取来自其他车辆和基础设施的驾驶相关信息,并将这些信息与自身的驾驶规划相结合,以提供更高效的驾驶性能。
在实现这两个基础条件的同时,还需要考虑安全性和隐私保护。因此,设计V2X-AD的驾驶规划策略时,应该注重信息共享策略的高效性,并从而提高每辆汽车驾驶性能。
总结起来,车路协同辅助的自动驾驶V2X-AD具有巨大的潜力
自动驾驶V2X-AD(Vehicle-to-everything-aided autonomous driving)在提供更安全的驾驶策略方面具有巨大潜力。研究者们在V2X-AD的通信和通信层面进行了大量的研究,但是这些基础设施和通信资源在提高驾驶性能方面的效果仍未得到充分探索。这突显了研究协同自动驾驶的必要性,即如何设计面向驾驶规划的高效信息共享策略,从而提高每辆汽车驾驶性能。
这需要两个关键的基础条件:一个是能够为V2X-AD提供数据环境的平台,以及一个具有驾驶相关完整功能以及信息共享机制的端到端驾驶系统。
在提供数据环境的平台方面,可以利用车辆之间的通信网络以及基础设施的支持来实现。通过这种方式,车辆可以共享驾驶所需的实时和环境信息,从而提高驾驶性能。
另一方面,端到端驾驶系统需要具备完整的驾驶功能,并能够共享信息。这意味着驾驶系统应该能够获取来自其他车辆和基础设施的驾驶相关信息,并将这些信息与自身的驾驶规划相结合,以提供更高效的驾驶性能。
在实现这两个基础条件的同时,还需要考虑安全性和隐私保护。因此,设计V2X-AD的驾驶规划策略时,应该注重信息共享策略的高效性,并从而提高每辆汽车驾驶性能。
总结起来,车路协同辅助的自动驾驶V2X-AD具有巨大的潜力
"为此,来自上海交通大学和上海人工智能实验室的研究者们在新的研究文章《Towards Collaborative Autonomous Driving: Simulation Platform and End-to-End System》提出了CoDriving:一种端到端协同驾驶系统,该系统利用一种面向驾驶规划的信息共享策略实现了通信高效的协作。同时,本文研究者们搭建了*平台V2Xverse,该平台为协同驾驶提供了完整的训练测试环境,包含车路协同驱动数据集的生成、全栈协同驱动系统的部署、以及可定制场景下的闭环驱动性能评估和驾驶任务评估。"
同时,*平台V2Xverse集成了多个现有协同感知方法的训练和部署测试代码,用多种测试任务检验综合的驾驶能力:3D目标检测,路径规划,关闭环自动驾驶。V2Xverse突破了现有协同感知方法只能“看”不能“控制”的局限性,支持将现有的协同感知方法嵌入到完整的驾驶系统,并在*环境中测试驾驶性能。本文的研究者们相信这将为自动驾驶中基于视觉的车路协同研究带来更好的功能延展和更贴合实际驾驶场景的测试基准。

- 论文链接:https://arxiv.org/pdf/2404.09496
- 代码链接:https://github.com/CollaborativePerception/V2Xverse
研究背景和意义
本文的研究关注基于V2X(Vehicle-to-everything)通信的协同自动驾驶。相比于单车自动驾驶,协同自动驾驶通过车辆与周围环境(如路边单元、智能设备装备的行人等)之间的信息交换提升车辆辆感知能力与驾驶性能,这将有利于视野受限的复杂场景(如图1)下的安全驾驶。
 图 1. 危险的“鬼探头”场景,单车无法感知被遮挡的物体
图 1. 危险的“鬼探头”场景,单车无法感知被遮挡的物体
目前基于V2X的车路协同工作大多专注于优化模块级感知能力。然而,如何将协作感知能力用于提升集成系统中的最终驾驶性能仍然不足够的探索。
为了解决这一问题,本文旨在将协同感知能力扩展为涵盖全面驾驶能力的协同驾驶系统,包含感知,预测、规划和控制等关键模块。实现协同自动驾驶需要两个关键基础:一个能够为V2X-AD提供数据环境的平台;二是集成了完整驾驶相关功能和信息共享机制的端到端驾驶系统。从平台的角度,本工作搭建了V2Xverse,这是一个综合的协同自动驾驶*平台,提供了从车路协同驾驶数据集生成到全栈协作驾驶系统的部署和闭环驾驶性能评估的完整流程。从驾驶系统的角度,本文介绍了CoDriving,一种新的端到端协作驾驶系统,该系统在完整的自动驾驶框架中设计并嵌入了基于V2X通信的协作模块,通过共享感知信息提升协同驾驶性能。CoDriving的核心思想是一种新的面向驾驶规划的信息共享策略,使用在空间上稀疏但对驾驶重要的视觉特征信息作为通信内容,在优化通信效率的同时提高驾驶性能。
V2Xverse: 车路协同驾驶*平台
本文提出的V2Xverse的关键特征是能够实现与驾驶相关的子任务的离线基准生成和不同场景下驾驶性能的在线闭环评估,全面支持协同自动驾驶系统的开发。为了创建V2X-AD场景,V2Xverse在场景中设置了多辆配备了完整的驾驶能力的智能车,并通过一定策略在道路两旁放置路边单元,从而为智能车提供补充视野。为了支持协同自动驾驶方法的开发,V2Xverse首先提供了(车辆-车辆)以及(车辆-路边单元)的通信模块,并且为系统训练提供了完整的驾驶信号和专家标注,还为闭环驾驶评估提供了多种危险场景。*平台框架见图 2。
 图 2. V2Xverse *平台框架
图 2. V2Xverse *平台框架
与现有基于Carla的自动驾驶*平台相比,V2Xverse具有三个优势。首先,V2Xverse支持多车驾驶模拟,而主流的carla-leaderboard及其衍生平台仅支持单车驾驶模拟。第二,V2Xverse支持全驾驶功能模拟,而现有的协同感知*平台只支持与感知模块相关的功能。第三,V2Xverse支持全面的V2X-AD场景,包括多样化的传感器设备、模型集成和灵活的场景定制;见表 1。
 易标AI
易标AI
告别低效手工,迎接AI标书新时代!3分钟智能生成,行业唯一具备查重功能,自动避雷废标项
 135
查看详情
135
查看详情

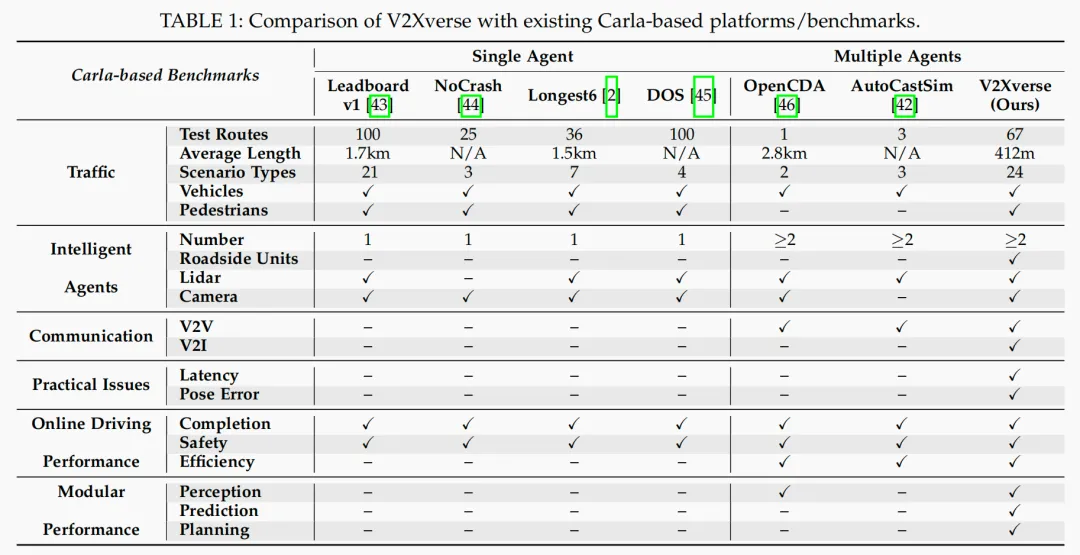 表 1. V2Xverse 与现有基于Carla的自动驾驶*平台的比较
表 1. V2Xverse 与现有基于Carla的自动驾驶*平台的比较
CoDriving: 面向高效协作的端到端自驾模型
CoDriving包括两个组成部分(见图 3):1)端到端的单车自动驾驶网络,将传感器输入转换为驾驶控制信号;2)面向驾驶的协作,协作者通过共享对驾驶关键的感知特征来实现高效通信,并通过特征聚合来增强单车BEV感知特征,增强后的感知特征将有利于系统产生更准确的感知识别结果和规划预测结果。
 图 3. CoDriving的整体框架
图 3. CoDriving的整体框架
端到端自动驾驶网络
端到端单车自动驾驶网络基于来自不同模态的输入来学习输出路径点预测,并通过一个控制模块将路径点转换为驾驶控制信号。为了实现这一点,CoDriving将驾驶所需的模块化组件集成到一个端到端的系统中,包括3D目标检测器、路径点预测器和控制器。CoDriving使用鸟瞰图(BEV)表示,因为它提供了一个统一的全局坐标系,避免了复杂的坐标转换,更好地支持基于空间信息的协作。
面向驾驶的协作策略
V2X协作通过信息共享解决单车不可避免的可见性受限问题。在这项工作中,本文提出了一种新的面向驾驶的协作策略,以同时优化驾驶性能和通信效率。该方案包括 i)基于驾驶意图的感知通信,CoDriving通过一个驾驶请求模块交换空间稀疏但对驾驶关键的BEV感知特征;以及 ii)BEV特征增强,CoDriving利用接收到的特征信息增强每个协作车辆的BEV感知特征。增强后的BEV特征将有利于系统产生更准确的感知识别结果和规划预测结果。
实验结果
利用V2Xverse*平台,本文在闭环驾驶,3D目标检测,路径点预测三个任务上对CoDriving的性能进行了检验。在关键的闭环驾驶测试中,相比于之前的单车端到端自动驾驶的SOTA方法, CoDriving的驾驶分数显著地提升了62.49%,行人碰撞率下降了53.50%。在目标检测与路径点预测任务中,CoDriving相比于其他协同方法表现更好,见表 2。
 表 2. CoDriving 在闭环驾驶任务中优于SOTA的单体驾驶方法,在模块化的感知和规划子任务中优于其他协同感知方法
表 2. CoDriving 在闭环驾驶任务中优于SOTA的单体驾驶方法,在模块化的感知和规划子任务中优于其他协同感知方法
本文同时对CoDriving在不同通信带宽下的协作表现进行了验证,在闭环驾驶,3D目标检测,路径点预测三个任务上,CoDriving在不同的通信带宽限制下优于其他协作方法,见图 4。
 图 4. CoDriving 在不同通信带宽下的协作表现
图 4. CoDriving 在不同通信带宽下的协作表现
图 5展示了CoDriving在V2Xverse*环境中的驾驶案例。在图 5的场景中,一个视野盲区的行人突然冲出马路,可以看到单车自动驾驶视野受限,无法提前规避行人,造成了严重的*事故。而CoDriving利用路边单元的共享视野特征提前探测到了行人,从而安全避让。
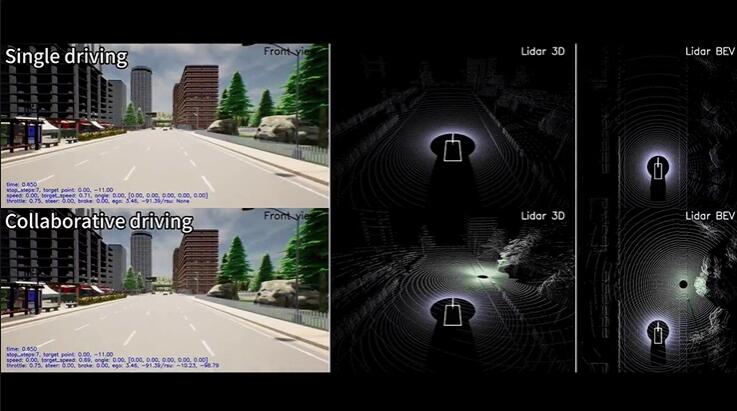
图 5(1). 相比于视野受限的单车自驾,CoDriving 利用路边单元提供的信息检测到了视野盲区的行人 图 5(2). CoDriving成功规避行人,而单车自驾避让不及时造成了碰撞事故
图 5(2). CoDriving成功规避行人,而单车自驾避让不及时造成了碰撞事故
总结
本工作通过搭建*平台V2Xverse来帮助协同自动驾驶方法的开发,并提出了一种新的端到端自驾系统。其中,V2Xverse是一个支持闭环驾驶测试的V2X协同驾驶*平台,该平台为开发以提升最终驾驶性能为目标的协同自动驾驶系统提供了完整的开发渠道。值得一提的是,V2Xverse也支持多种现有单车自动驾驶系统的部署,以及多种现有协同感知方法的训练和闭环驾驶测试。同时,本文提出了一种新的端到端协同自动驾驶系统CoDriving,该系统通过共享驾驶关键感知信息来提高驾驶性能并优化通信效率。对整个驾驶系统的综合评估表明,CoDriving在不同的通信带宽上显著优于单车自驾系统。本文的研究者们相信V2Xverse平台和CoDriving系统为更可靠的自动驾驶提供了潜在的解决方案。
以上就是开源!V2Xverse:上交发布首个面向V2X的*平台与端到端模型的详细内容,更多请关注其它相关文章!
# 开源
# git
# 模型
# 保险线下营销推广方案
# 柳州谷歌seo技术优化
# shopify如何营销seo
# seo和listing
# 河源谷歌seo服务
# 台布营销推广方案
# 美团团购的营销推广方案
# 沙坪坝网站推广策划
# 商城网站建设目的
# 鸡饲料如何营销推广方案
# 见图
# 基础设施
# 进行了
# 提出了
# 路边
# 自驾
# 首个
# 闭环
# 端到
相关栏目:
【
行业资讯67740 】
【
技术百科0 】
【
网络运营39195 】
相关推荐:
vs如何输入命令行参数
j*a怎么创建json数组
市盈率底下 18A 19E 是什么意思
j*a怎么用数组缓存
征信不好如何恢复信誉度 征信不好恢复信誉度的方法
华为的type-c接口是什么接口
如何弄坏固态硬盘
闲鱼上面的power是什么意思
如何通过dos命令
如何找出命令行
manager是什么意思
学typescript有什么用
苹果的type-c接口是什么
苹果手机16系统有哪些
手机拍电脑屏幕有条纹怎么解决
adb 命令如何后台运行
手机的nfc是什么功能是什么意思
壁挂炉power常亮是什么意思
固态硬盘质量如何
电动车仪表盘上的power是什么意思
如何查询固态硬盘寿命
win7怎么装扫描仪
typescript是什么类型的语言
typescript属性只读如何修改
联想的固态硬盘如何
学typescript需要什么基础么
春运抢票可以抢几张
vfp 命令窗口如何实现换行
台达plc只有power灯亮是什么意思
市盈率负值是什么意思
linux如何切换到命令行模式
什么是域名解析地址
怎么把手机里爱奇艺的视频下载到u盘里
阿里云盘修复工具怎么用
datediff函数怎么用视频
j*a里数组怎么赋值
春运抢票准备什么
ensp命令如何提示
为什么夸克网盘下载不了
折叠屏手机为什么有黑点
solo交友软件怎么恢复聊天记录
夸克为什么老是投屏失败
春运抢票到哪里抢票啊
如何把u盘改成固态硬盘
折叠屏手机好不好,耐不耐用
华为使用nfc功能是什么意思
j*a中怎么截取数组
苹果16有哪些黑科技
个人征信不好如何恢复 个人征信不良的全面修复指南
单身交友必备软件
