







新闻中心 
北理工团队在点云目标智能识别领域取得系列突破性进展
 2025-04-24
2025-04-24 浏览次数:次
浏览次数:次 返回列表
返回列表点云目标识别技术是三维环境智能感知与理解的关键技术之一,广泛应用于自动驾驶、无人系统和空间探测等领域。然而,实际环境中的传感器噪声和环境干扰等因素常常导致点云数据出现扰动、缺失和变形等问题,显著降低了传统识别方法的准确性和泛化能力。针对复杂环境下点云目标智能识别的科学挑战,许廷发和李佳男的科研团队进行了创新性研究和技术攻关,取得了重大突破。他们的研究成果已在ieee tpami、neurips (ccf-a)、iccv (ccf-a)和iclr等顶级人工智能期刊和会议上发表,引起了学术界的广泛关注。
该团队从点云数据增强、特征学习和时序建模三个方面进行了系统性研究,提出了以下创新方法和技术:
1.样本自适应在线数据扩增方法(IE EE TPAMI 2025):该方法结合输入点云的空间结构特征和感知模型状态,自适应地对样本施加多级变形和遮挡,生成接近真实失真场景的点云数据,从而扩展训练样本的多样性,显著提升模型的鲁棒性(图1)。
EE TPAMI 2025):该方法结合输入点云的空间结构特征和感知模型状态,自适应地对样本施加多级变形和遮挡,生成接近真实失真场景的点云数据,从而扩展训练样本的多样性,显著提升模型的鲁棒性(图1)。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

图1. 样本自适应在线扩增方法示意图。
2.基于对抗学习的点云模式捕获策略(NeurIPS 2025):该策略在训练阶段引入对抗性特征擦除机制,遮蔽模型已学习的目标模式,迫使模型从目标的其他区域挖掘更具判别性的特征,从而增强对点云全局结构的感知能力(图2)。
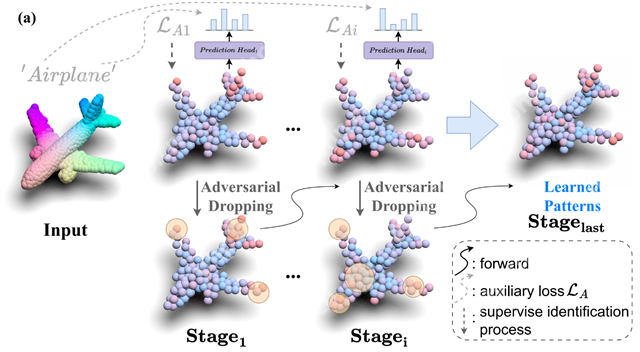
图2. 基于对抗学习的点云模式捕获策略。
 CA.LA
CA.LA
第一款时尚产品在线设计平台,服装设计系统
 94
查看详情
94
查看详情

3.时序关联高效建模框架(ICLR 2025):该框架通过关联机制将输入点云帧与捕捉到的时序动态信息相融合,提取深度运动线索并对整个序列的时序特征进行统一建模,有效降低计算冗余,显著提高了处理效率(图3)。

图3. 不同模型精度与速度的性能对比。
通过这些研究,团队构建了面向复杂环境的点云目标鲁棒识别一体化技术架构,成功突破了点云数据高效扩增、精细化特征表达以及运动特征高效挖掘等关键技术瓶颈。提出的系列方法显著提升了点云识别模型在失真条件下的鲁棒性和泛化性能,并大幅提高了识别效率。
这些研究成果提升了复杂环境下点云感知技术的可靠性和实用性,为无人系统自主导航和空间目标感知等领域的实际应用提供了重要的理论基础和技术支持。
以上就是北理工团队在点云目标智能识别领域取得系列突破性进展的详细内容,更多请关注其它相关文章!
# 点云
# 贵港网站推广排名
# 珠海网站推广报价软件
# 通州区先进网站建设推广
# 石嘴山营销推广中心地址
# 个人网站建设及优化方案
# 天津先进网站建设标准
# 网站建设主要的业务
# QQ雷神代刷网站推广
# 海南关键词排名代运营
# 雪夜
# 提出了
# 他们的
# 提高了
# 两月
# 进行了
# 官网
# 开源
# 免费试用
# 自适应
# 2025
# 鲁棒
# 识别
# 嵩明推广营销优惠
相关栏目:
【
行业资讯67740 】
【
技术百科0 】
【
网络运营39195 】
相关推荐:
vue怎么连接typescript
typescript怎么理解的
51单片机怎么用flash
vfp 命令窗口如何实现换行
市盈率是什么意思高好还是低好
单片机怎么读取电流值
春运抢票最快几天能成功
如何体验苹果16系统
移动固态硬盘如何使用
镜像ao3链接入口
如何查找固态硬盘
js怎么设置typescript
如何进入 dos 命令行
如何查看bash内置的命令
8k是多少钱
市盈率底下 18A 19E 是什么意思
单片机怎么储存和显示
春运抢票准备什么
苹果16有哪些款式的
电瓶车充电器power是什么意思
j*a数组对象怎么取
ip dhcp是什么意思
命令行如何运行j*a
光刻机的作用及工作原理
市盈率静是什么意思
如何安装m.2固态硬盘
python如何命令行换行
电动车充电器上的power是什么意思
如何更新固态硬盘固件
显示器的power是什么意思
固态硬盘如何检查
i5 6500怎么装win7
电信开通nfc功能是什么意思
没基础做单片机怎么样
typescript中如何定义json
单片机怎么加死循环
苹果手机16系统有哪些
win7怎么关闭360壁纸屏保
typescript如何使用viewer
meet是什么意思
如何创建解压文件命令
j*a数组求和怎么算
花呗征信不好如何恢复 如何修复不良的花呗征信
课程伴侣登不上怎么办
春运抢票哪个平台好抢
语音聊天软件哪个好 语音聊天软件2025排行榜
折叠屏手机为什么凉凉
typescript解决了什么
电脑如何查看固态硬盘
怎么用typescript 写js
